


Cette transformation va nous permettre de détecter les lignes d'une image. Cette transformation a besoin d'une image binaire.
Chaque pixel de l'image binaire est représenté par une ligne dans l'espace de Hough. Regardez l'image suivante :
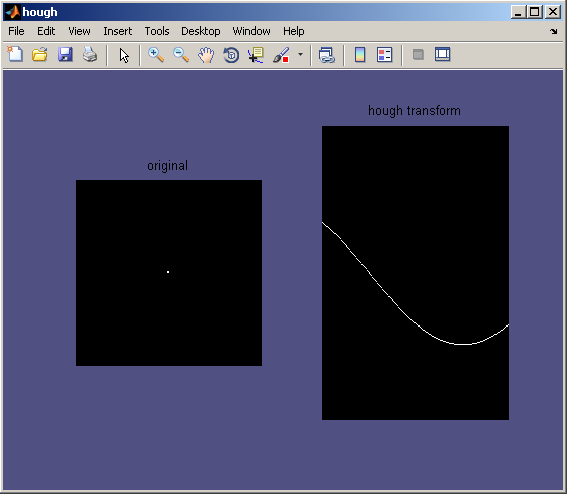
A gauche l'image d'origine avec un seul point à 1. A droite la transformation dans l'espace de Hough. On peut voir que le point à été transformé en ligne.
regardons maintenant ce qui se passe pour plusieurs points appartenant à une même ligne.
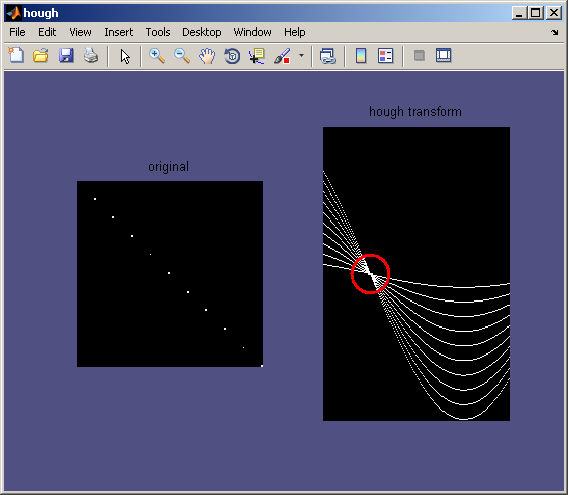
On remarque que la transformation des pixels forme des lignes qui sont concourantes en un même point (dans le cercle rouge). Grâce à ce point, on peut
retrouver la ligne qui passe par tous les points de l'image binaire.
Nous commençons par faire une détection de contours sur une image originale. Le but est de transformer l'image en binaire et de détecter les lignes des contours.
La taille de la matrice de transformation sera de la taille des lignes pour
et de la taille de la diagonal de l'image pour rho.
soit :
Où M est le nombre de lignes et N le nombre de colonnes.
Cette matrice est initialisée à zéro. Maintenant pour chaque pixel de l'image qui est à 1 nous allons effectuer la transformation de hough.
Chaque point représente une ligne dans l'espace de Hough, dans la matrice de transformation nous allons augmenter de 1 chaque point de la ligne.
De ce fait, à chaque fois qu'une ligne passe par un point de la matrice, sa valeur croit. Plus il y a de ligne passant par un point plus celui-ci
aura une importance. Le calcul qui nous permet de trouver les coordonnées dans la matrice de transformation à augmenter est :
à chaque point de l'image = 1 on fait pour
de 0 à
Où x est la coordonnée du pixel en ligne et y la coordonnée en colonne. Grâce aux coordonnées (rho,
) on augmente la matrice de transformation.
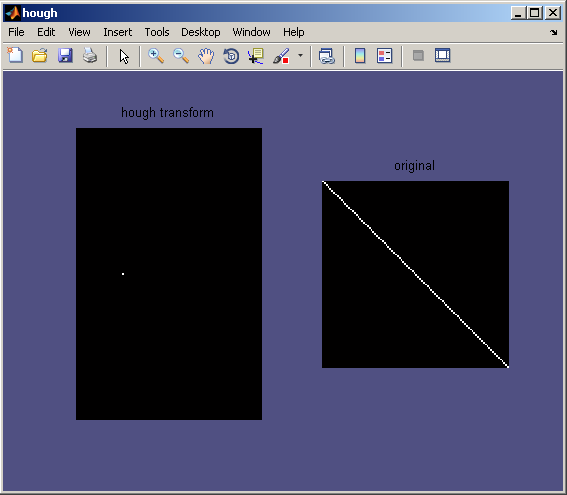
une fois la transformation appliquée sur toute l'image nous trouvons un résultat qui peut ressembler à :

Il faut maintenant trouver les points qui ont de forts coefficients. Dans le programme, j'ai utilisé une technique de seuillage suivi par une détection
des maxima locaux .
Maintenant que nous avons les coordonnées les plus importantes, il faut reconstruire les lignes. On a vu plus haut que chaque point de l'espace de hough
donné une ligne dans l'espace x et y de l'image.
La méthode consiste à calculer pour chaque pixel de l'image le résultat s'il correspond ou non à une ligne issue des coordonnées.
dans chaque coordonnée nous avons un rho et un
. On calcule pour chaque x et y tel que x=[1 M] et y=[1 N] :
si
alors nous mettons la matrice résultat (x,y) à 1 sinon nous la laissons à 0.
function guihoug
clear all;
close all;
figure( 'Name','translation',...
'NumberTitle','off',...
'color',[0.3137 0.3137 0.5098]);
a(1)=axes('units','normalized',...
'position',[0.05 0.55 0.35 0.35]);
a(2)=axes('units','normalized',...
'position',[0.5 0.55 0.35 0.35]);
a(3)=axes('units','normalized',...
'position',[0.05 0.1 0.35 0.35]);
a(4)=axes('units','normalized',...
'position',[0.5 0.1 0.35 0.35]);
uicontrol( 'style','pushbutton',...
'string','load',...
'Position', [10 10 50 20],...
'callback',@loadimage);
uicontrol( 'style','pushbutton',...
'string','executer',...
'Position', [290 10 100 20],...
'callback',@executer);
uicontrol( 'style','edit',...
'string','10',...
'Position', [180 10 50 20],...
'callback',{@nbline,'nline'});
text(1)=uicontrol( 'style','text',...
'string','number of line: ',...
'Position', [80 10 100 20]);
%parametre initial
setappdata(gcf,'x',1);
setappdata(gcf,'type',0);
setappdata(gcf,'nline',10);
function loadimage(~,~)
% appeler quand appui check box
[filename, pathname] = uigetfile({'*.jpg;*.tif;*.png;*.gif;*.bmp','All Image Files';...
'*.*','All Files' },'mytitle',...
'C:\Work\myfile.jpg')
x = imread(filename);
if (length(size(x))>2)
x=x(:,:,1);% on prend une seul plan image noir et blanc chaque plan sont egaux
end
k = whos('x');
if k.class == 'uint8'
k=8;
end
setappdata(1,'k',k);
setappdata(1,'x',x);
axes(a(1))
imshow(x)
title('original image')
end
function executer(hObj,~,Name)
type = getappdata(1,'type');
img = getappdata(1,'x');
nline = getappdata(1,'nline');
[ligne colonne]=size(img);
centreligne = round(ligne/2);
centrecolonne = round(colonne/2);
img=double(img);
%détection de contour
%edge detection
%imgedge = edge(img,'canny');prewitt
imgedge = edge(img,'prewitt');
axes(a(2))
imshow(imgedge)
title('edge detection')
%
theta_step = pi/(ligne);
r_max = ceil(((ligne^2 + colonne^2)^0.5 / 2)) ;
A=zeros(ligne,r_max*2+1);%A(theta, r)
for i = 1 : ligne
for j = 1 : colonne
if (imgedge(i,j))==1
x=i-centreligne;
y=j-centrecolonne;
%p=1;
for t = 1 : ligne
theta = t * theta_step;
r = r_max + 1+round(x * cos(theta) + y * sin(theta));
% h(p)=r;
A(t,r)= A(t,r) + 1;
%p=p+1
end
end
end
end
axes(a(3))
imshow(uint8(-(A-max(max(A))*(255/max(max(A))))))
title('hough tranformation')
threshold = max(max(A))*0.4;
A(A<threshold)=0;
A = wextend(2,'zpd',A,2);
for i = 3 : size(A,1)-3
for j = 3 : size(A,2)-3
maxi=max(max(A(i-2:i+2,j-2:j+2)));
if A(i,j)~=maxi
A(i,j)=0;
end
end
end
A=A(3:end-2,3:end-2);
%A(A>0)=1;
maxlocaux=[]; %[theta r]
p=1;
for i = 1 : size(A,1)
for j = 1 : size(A,2)
if A(i,j) ~=0
maxlocaux(p,:)=[i,j,A(i,j)];
p=p+1;
end
end
end
%sort
[value tri] = sort(maxlocaux(:,3),1,'descend');
if nline>length(maxlocaux(:,3));
nline = length(maxlocaux(:,3));
end
for i = 1 : nline
maxlocauxsort(i,:)=maxlocaux(tri(i),1:2);
end
img2=zeros(ligne,colonne);
for p = 1 : length(maxlocauxsort)
pointH=maxlocauxsort(p,:);
for i = 1 : ligne
for j = 1 : colonne
x=i-centreligne;
y=j-centrecolonne;
%r = r_max + 1+round( i* cos(-pointH(1)*theta_step) + j * sin(-pointH(1)*theta_step))
r = r_max + 1+round( x* cos(pointH(1)*theta_step) + y * sin(pointH(1)*theta_step));
if r == pointH(2)
img2(i,j)=1;
end
end
end
end
axes(a(4))
imshow(img2)
title('line')
figure
imshow(img2)
end
function nbline(hObj,~,Name)
% Called when user activates popup menu
val = str2num(get(hObj,'String')); %0|1=ligne, 2=colonne, 3=croix, 4=carre
setappdata(1,Name,val);
end
end

Copyright © 2010-2014, tous droits réservés, contact : operationpixel@free.fr